A Technological MARVel
Heidi Williams
Imagine you're a marine field researcher traveling to Canada's Northwest Territories to perform subsurface bathymetric research on ponds and small lakes that appear in the warmer months within the Arctic Circle. You fly in by helicopter, with your equipment making the trip in an open basket affixed to the outside of the chopper. You're dropped off about a mile from your destination, and face the daunting reality of having to hike in with all your gear.
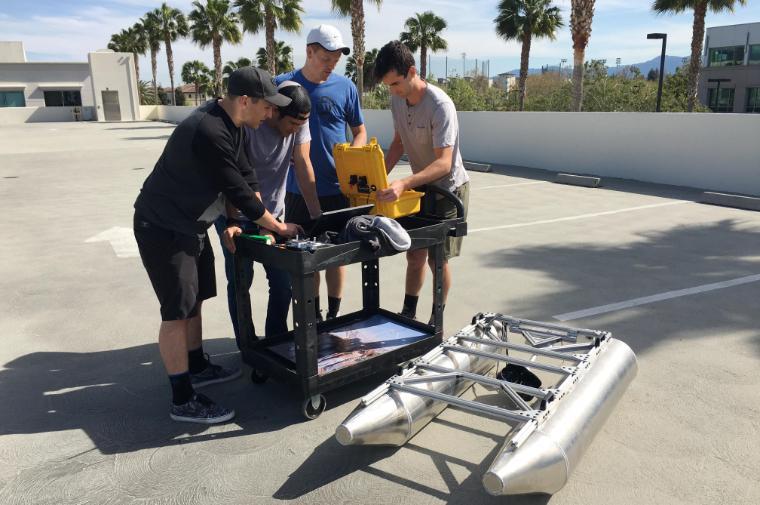
Seniors Drew Azevedo, Sam Bertram, Ben Hopner (mechanical engineering) and Gregorio Del Vecchio (electrical engineering) have spent the past eight months addressing that very scenario as they designed MARV—Marine Autonomous Research Vessel, a rugged, transportable research platform that can be outfitted with a variety of sensors for data acquisition.
"We were approached by two marine researchers who currently travel with an inflatable boat and outboard motor that they use to collect data manually," Del Vecchio said. "One of the scientists has funding from the University of Alaska, Fairbanks, and he is paying the Robotics Systems Lab (RSL) to design a better system. Their current method is highly involved for the scientists conducting the research, who have a difficult time being as precise as a computer programmed robotic vessel could be. They asked us to make life easier: Make a craft suitable for transport that helps them gather more reliable data."
Denizens of the RSL, the team knew that a compact, autonomous craft could be programmed to cover a large area, collecting information from numerous predefined locations. They took inspiration from the Lab's proven SWATH (small waterplane area twin hull) boat, the product of a decade of development work by dozens of undergraduate and graduate students, a craft regularly deployed on science missions in Lake Tahoe and the Monterey Bay. One small problem: The SWATH weighs 800 pounds.
Hopner said: "We wanted that capability but compact and user-friendly, so we prototyped a micro version of SWATH. After many iterations, we ended up with a radio-controlled hull consisting of two pontoons manufactured from 5052 aluminum. These pontoons are connected by a bridge made from 8020 structural aluminum framing that holds a water-resistant Pelican case for storing the brains of the operation."
The team used every tool at their disposal. In state-of-the-art lab facilities—mechanical engineering's Machine Shop and SCU Maker Lab's rapid prototyping equipment, laser cutters, and 3D printers—they fabricated most of the components. They sought input from their advisor, RSL director and mechanical engineering professor Christopher Kitts. And of course, being millennials, they also tapped into YouTube. "We watched an episode from 'How It's Made' about pontoon boats that was really helpful," said Hopner.
With two to three researchers sharing the load, the team was given an upper weight limit of 110 pounds. Sounds doable—except that a chirp sonar sensor used for studying subterranean soil compositions and layering or finding fault lines can weigh upwards of 30 pounds. Ultimately, the craft they built, which is easily dismantled and reassembled, weighs about 50 pounds before the batteries and sensors are added.
Next, MARV needed to be programmed. "Intel is also supporting our project," said Azevedo. "We wrote software to run a couple of their Edison processors and we bought an off-the-shelf autopilot that we're using for navigation. It's commonly used for drones, but we're adapting it to work on a boat, and it fits our purposes very well."
Bertram noted: "We designed everything to be modular and easily replaceable or modifiable. Using components that are readily available and that can be replaced in a day or two is optimal for field researchers in remote areas. When the scientists install their sensors and pre-program their mission, they will be able to collect reliable data from a platform that is easy to carry to remote areas."
"They asked us to make life easier," he added. "MARV does that."