Robotic Systems
The Lab has a wide variety of robots, field control systems, testbeds, instruments, and support equipment, all of which are routinely used in order to perform field operations with partners/sponsors/collaborators from the government, industry, academia, and the non-profit sector. A few of these systems are described here.
Robots
| System Image | Robotic System Description |
|---|---|
 |
Underwater Robots: We have built and routinely operate several custom-built, shallow-water (<500m) tethered underwater robots (ROVs). These include professional-class, high-power ROVs as well as simpler battery-operated robots. Current vehicles include Triton (shown here, yellow), Nautilus (shown, red), Tessie, and Blue. These have been operated by students for missions involving the USGS, NASA, NOAA, the US Navy, MBARI, and academic partners. |
 |
Automated Boats: We have developed several automated boats for bathymetric mapping functions. These include SWATH (shown here) and MARV. SWATH has been used in partnership with USGS, NOAA, MBARI and academic partners to map significant portions of Lake Tahoe. |
 |
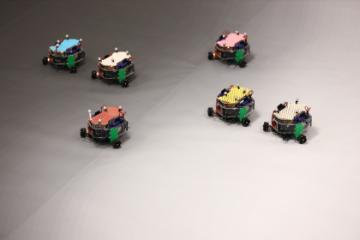
Automated Kayak Fleet: As part of our research work in multirobot systems, we have a fleet of 6 automated kayaks, capable of sailing in formation and performing advanced maneuvers for our work in adaptive navigation, much of which is sponsored by NSF. |
 |
Land rovers: We have ~15 wheeled/tracked outdoor robots, typically used to demonstrate new control techniques and to support educational projects. These include a number of Pioneer III-AT robots that are often used in our research work on multirobot formation control and adaptive navigation. |
 |
Rover Testbed: We have a custom-designed 12-robot indoor testbed, using small Omnidrive robots, a vision tracking system, a Matlab/Simulink control systems, and a technique for using printed floor sheets to convey environmental quantities, both scalar and vector in nature. This is routinely used to support our research work on multi-robot formation control and adaptive navigation. |
 |
UAVs/Drones: We have ~15 copter-style and winged UAVs, used for educational activities and research projects. We also routinely operate them to perform imaging and mapping services for the SCU campus (construction monitoring, archeological studies, marketing videos) and for local agricultural partners (multispectral imaging of crops, mapping, etc.). Several of these are student-designed. Others include commercial platforms from DJI (Inspire II, several Phantoms), 3DR (~6 X8s, Iris, Solos), Parrot (AR Drone 2s, DISCO), Yuneec (Typhoon), etc. |
| Manipulators: We have 2 Franka Panda cobots and several other manipulators being built using Robotis smart actuators. These systems support educational and research activities and serve as functional testbeds for manipulation/intervention systems being built for our field robots. |
Operational Control Systems
| Control System Image | System Function & Details |
|---|---|
 |
Satellite Control Network: The Lab owns and operates a distributed satellite operations network with multiple mission control nodes, communication stations, etc connected via the internet and located throughout the country. This system is used to control professional space missions with NASA and several industry partners. |
 |
Mobile Mission Control Trailer: This mobile command and control trailer is used as part of our satellite control network. It is also being used to support field deployments for our UAV missions. It has bunks and a bathroom (yes, it works!) to support multiday field deployments. |
Support Equipment
| Support Asset Image | Asset Description & Capacity |
|---|---|
 |
Boats: We have two manned boats to support marine operations, typically in Monterey and Lake Tahoe. Vehicles: We have an SUV and a pickup truck to carry equipment and two deployment trailers. Trailers: We have ~10 trailers of various sizes that we use to tow equipment and conduct operations. |
Specialty Instrumentation
The Lab also has a variety of instrumentation that can be installed on our robotic platforms and which are used for fieldwork. These instruments include:
- Marine instruments: acoustic tracking system, CTD sensors, water sampling systems, etc.
- Rover instruments: Ultra-wideband tracking and positioning systems, several infrared tracking systems, LIDAR and radar units, several types of vision systems, etc.
- UAV instruments: multispectral imagers, infrared cameras, visual cameras, and a package release mechanism, etc.