Robotic Systems Lab
A world-class field operation advancing robotic systems for air, land, sea, and space.
The RSL conducts a world-class field robotics program in which interdisciplinary teams of students develop and deploy advanced robotic systems and autonomous control technology missions on the land and in the air, sea, and space. Activities range from designing deep sea water sampling systems to discover new forms of life to conducting mission control activities for professional NASA and industry space missions. The Lab routinely collaborates with sponsors and partners from the government, industry, academia and the non-profit sector.
Each year, the Lab engages 100+ undergraduate and graduate students and 15+ faculty/staff members from 10+ departments across the university. Based on the compelling and applied nature of its program, the National Academy of Engineering named the Lab as one of its exemplar programs for Real World Engineering Education.
Looking for new students!
We have a wide range of design and research projects for students looking for capstone/thesis topics, directed research projects, etc. Topics include novel system/mechanism design, vehicle/manipulator control, perception systems, etc. Applications include environmental monitoring, agricultural automation, scientific exploration, etc. We are also looking for students to join our field operations teams for controlling underwater robots, aerial drones, and spacecraft.
Featured Activities
| Activity Image | Project Description and Recent Updates |
|---|---|
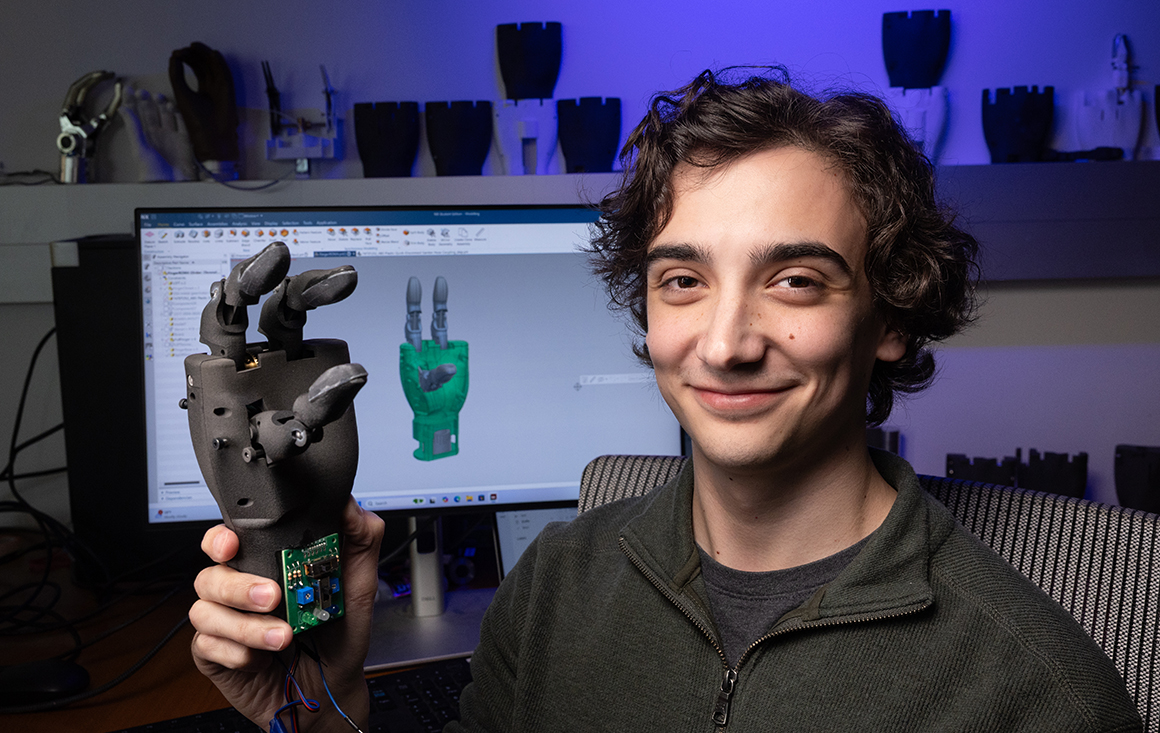 |
Jaipur Hand: The Lab is developing a ruggedized, ultra-low-cost, 1 DOF powered prosthetic hand for amputees in India. Several units were recently evaluated in India. Current activities are focused on design refinement and developing plans for scaled-up manufacturing. This project has been featured in a recent conference paper presented at the 2025 IEEE Global Humanitarian Technology Conference and in SCU news and events. |
 |
Automated Vertical Profilers for Marine Science: The Lab has developed several operational 'vertical profilers' which are now being evaluated for science operations with marine scientists at the Palos Verdes reef off the coast of Southern CA. Several new deployments are being planned for 2026. |
 |
Mission Operations for the NASA ACS3 Solar Sail Spacecraft: Since April 2024, students, staff and faculty have been performing routine mission control activities for NASA's latest solar sail technology demonstration spacecraft. RSL has served as the primary mission operator for more than 15 NASA and industry spacecraft over the past two decades. Learn more about ACS3 on NASA’s website. |
 |
Agricultural Robotics: The Lab has 4 modular agricultural robots that are being used to explore automated field operations. New developments include a high-precision spraying system. This project had a conference paper on Variable Rate Sprayer System at the ASME IMECE 2024 conference. |
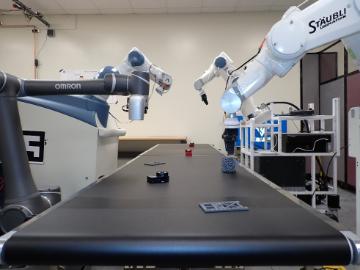 |
Robotic Workcell: The Lab has established a new manipulator workcell with 6 industrial robot arms, several conveyors, and overhead vision/tracking systems. One current design project involves the development of a new open-source, low-cost portfolio of end-effectors and tools. Another initiative is integrating manufacturing machines - starting with a laser cutter/etcher - to support automated small batch manufacturing. |
Featured Research
Students interested in learning more about this work are encouraged to refer to selected publications on these topics.
| Research Topic and Impact | Visual Methodology |
|---|---|
| Adaptive navigation of environmental scalar fields: The Lab is a leader in multirobot techniques to adaptively locate the max/min points in environmental fields, to move along contours, to move down/up ridge/trench formations, to locate saddle points, and to move along frontlines. These capabilities are fundamental for applications such as disaster response, environmental monitoring/characterization, exploration and security. Recent work in this area includes experimental demonstration with land rovers navigating RF fields and Chris Waight's doctoral research on extending adaptive navigation techniques to vector fields. |  |
| Collaborative operator-robot systems: While many researchers are exploring human-robot interface challenges, we are focusing on the collaborative manipulation and transport of objects. When an operator and one or more robots collectively move an object. One initiative focuses on having mobile robots reactively support objects as an operator applies guiding forces. Another initiative is focused on a technique in which an operator and a robot flexibly allocate responsibility for the control of different degrees of freedom on the object being manipulated. |  |
