Agricultural Robotics Initiative
Agricultural Robotics Initiative
California agriculture faces a number of critical challenges relating to the production and delivery of produce. These include a dramatic shortage of labor, severe limitations on the use of water, the desire for more efficient and sustainable farming practices, and the need for enhanced food security. These challenges, combined with the need for enhanced perception and dexterous handling relating to California’s specialty crops, demand innovative and cost-effective robotic and automation technology.
In partnership with a number of growers throughout Northern California, RSL has initiated a new program focused on developing robotic systems and technologies for agricultural applications. This work addresses both in-the-field technologies for sensing, growing and harvesting crops as well as production facility capabilities for classifying, processing and packing food products. In cooperation with the Leavey School of Business, RSL personnel are also exploring food innovation and related topics.
To date, this work has attracted nearly $1.5 million of R&D grants and philanthropic support. We are also preparing to open an off-campus R&D lab to support these efforts, and to launch a field test partnership with a local grower.
Register for Hack for Humanity 2026
Featured Systems
| System Image | System Description |
|---|---|
 |
Several teams are developing aspects of RSL’s new ag rover system. The core part of this system is an adjustable-width chassis with a variety of autonomous navigation modes. Application specific tools are being developed for a range of in-field tasks from transplanting to spraying. |
 |
A graduate student capstone project led to the development of a robotic stage system for greenhouse environments. A modular toolhead system has been defined, and tools for spraying and measuring soil moisture have been implemented. The system is planned for expansion and installation in SCU’s on-campus greenhouse. |
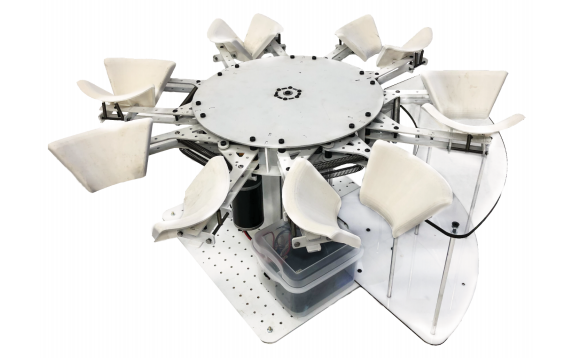 |
An undergraduate mechanical engineering team developed a motorized Romaine lettuce trimmer. As it rotates, the system accepts a head of lettuce, softly grasps it, positions the stalk for automated trimming, and then releases the head onto a conveyor for subsequent bagging. |